力向量
Force Vector
力在力学中通常由以下三个要素唯一确定:
大小 (magnitude)
方向 (direction)
作用点 (point of application)
其中,方向和作用点这两个要素又共同决定作用线 (line of action)。
本文讨论的力向量,均假设作用于同一作用线上。倘若没有作用于同一作用线上,那么将会涉及到对于力矩 (moment) 的讨论。见:力系的合力与合力矩。
建立力向量的一般流程:
力向量是描述物体所受力的大小与方向的基本工具。在力学中,准确表示力的方向和大小对于分析物体的受力情况至关重要。常用的三种力向量描述方式如下:
无论采用哪种向量描述方式,最终在计算时,都应该转化为笛卡尔坐标的形式。
笛卡尔坐标系
Cartesian Coordinates
笛卡尔坐标系以三个相互垂直的坐标轴
其中,

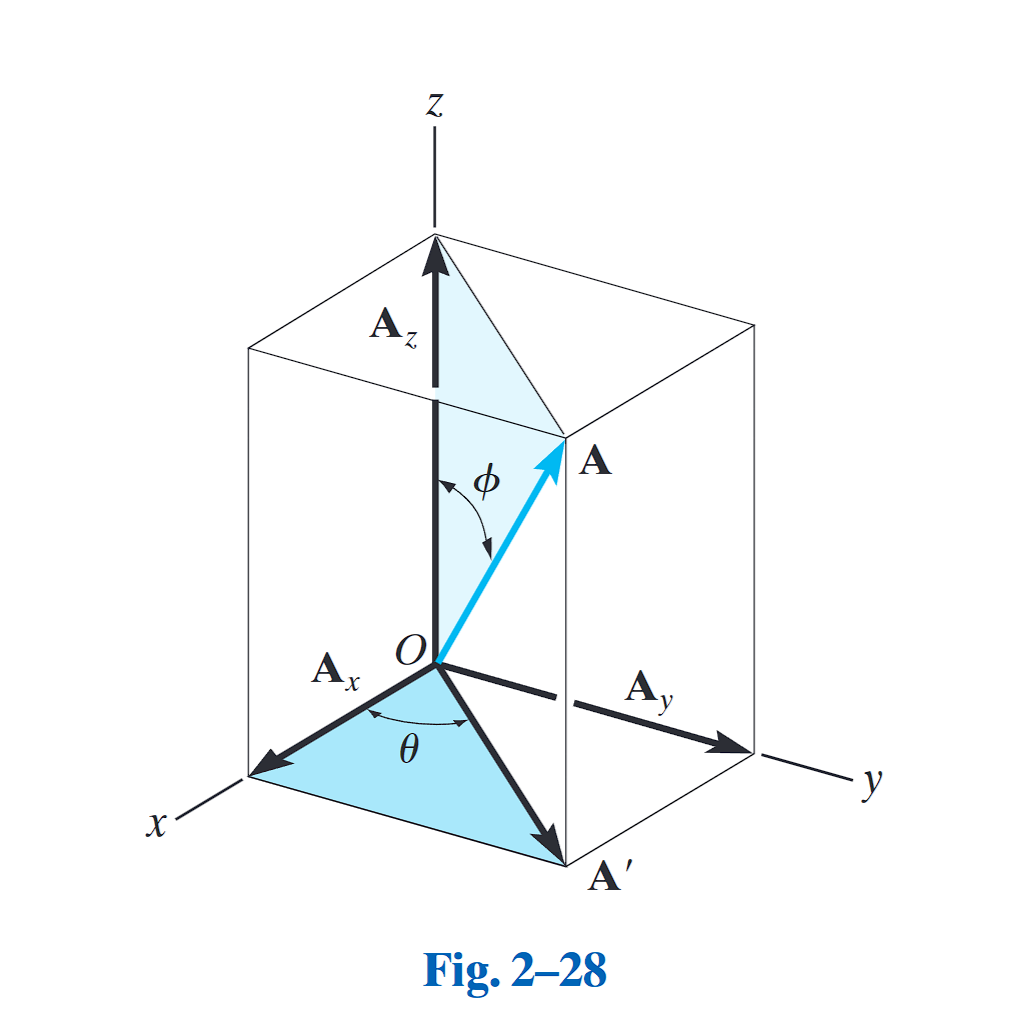
球坐标系
Spherical Coordinates
球坐标系适用于描述以某点为原点的三维空间中的向量,特别适合处理具有球对称性质的问题。力向量通过极径
其中,
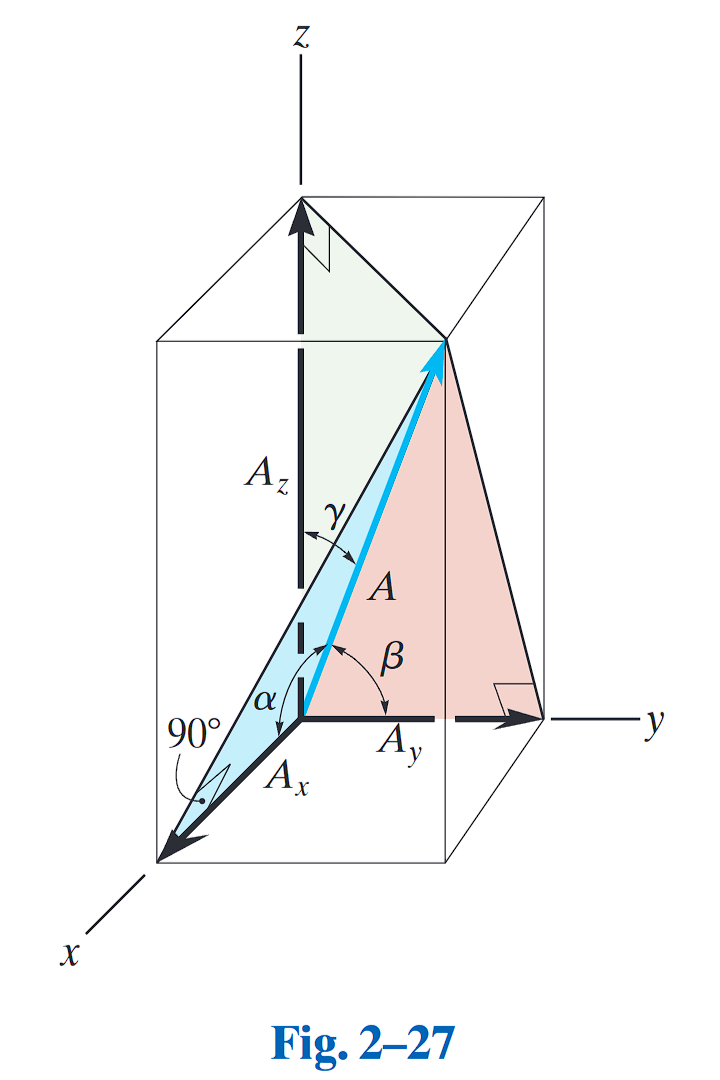
大小与坐标方向角
Magnitude and Coordinate Direction Angles
这种表示方法直接用力的大小
方向角
Python 力向量的描述与转换
下面示例展示了如何在三种力向量描述方式之间进行转换:
import numpy as np
# 示例向量(笛卡尔坐标)
F_cartesian = np.array([x, y, z])
# 示例向量(球坐标)
# pho: 径向距离,theta: 方位角(绕z轴),phi: 极角(与z轴夹角)
F_spherical = np.array([pho, theta, phi])
# 示例向量(大小与坐标方向角)
# magnitude: 向量大小,alpha/beta/gamma: 与x/y/z轴的夹角
F_angles = np.array([magnitude, alpha, beta, gamma])坐标转换函数实现
import numpy as np
def spherical_to_cartesian(spherical_coords: np.ndarray) -> np.ndarray:
"""
球坐标 转 笛卡尔坐标
参数:
spherical_coords (np.ndarray): 形状为 (3,),元素依次为
- rho: 径向距离,标量 >= 0
- theta: 方位角(绕 z 轴的旋转角),单位弧度,范围通常为 [0, 2π)
- phi: 极角(从 z 轴向下的夹角),单位弧度,范围为 [0, π]
返回:
np.ndarray: 形状为 (3,),对应笛卡尔坐标 (x, y, z)
"""
rho, theta, phi = spherical_coords
x = rho * np.sin(phi) * np.cos(theta)
y = rho * np.sin(phi) * np.sin(theta)
z = rho * np.cos(phi)
return np.array([x, y, z])
def angles_to_cartesian(angles: np.ndarray) -> np.ndarray:
"""
方向角 转 笛卡尔坐标
参数:
angles (np.ndarray): 形状为 (4,),元素依次为
- magnitude: 向量的幅值,标量 >= 0
- alpha: 与 x 轴的夹角,单位弧度,范围 [0, π]
- beta: 与 y 轴的夹角,单位弧度,范围 [0, π]
- gamma: 与 z 轴的夹角,单位弧度,范围 [0, π]
注意:
方向角满足关系:cos²(alpha) + cos²(beta) + cos²(gamma) = 1。
输入角度应满足该几何约束。
返回:
np.ndarray: 形状为 (3,),对应笛卡尔坐标 (x, y, z)
"""
magnitude, alpha, beta, gamma = angles
x = magnitude * np.cos(alpha)
y = magnitude * np.cos(beta)
z = magnitude * np.cos(gamma)
return np.array([x, y, z])
def cartesian_to_spherical(vec: np.ndarray) -> np.ndarray:
"""
笛卡尔坐标 转 球坐标
参数:
vec (np.ndarray): 形状为 (3,),对应笛卡尔坐标 (x, y, z)
返回:
np.ndarray: 形状为 (3,),元素依次为
- rho: 径向距离,标量 >= 0
- theta: 方位角(绕 z 轴的旋转角),单位弧度,范围 (-π, π]
- phi: 极角(从 z 轴向下的夹角),单位弧度,范围 [0, π]
当输入向量为零向量时,theta 和 phi 返回 np.nan 表示未定义。
"""
x, y, z = vec
rho = np.linalg.norm(vec)
if rho == 0:
theta = phi = np.nan
else:
theta = np.arctan2(y, x)
phi = np.arctan2(np.sqrt(x**2 + y**2), z)
return np.array([rho, theta, phi])
def cartesian_to_angles(vec: np.ndarray) -> np.ndarray:
"""
笛卡尔坐标 转 方向角
参数:
vec (np.ndarray): 形状为 (3,),对应笛卡尔坐标 (x, y, z)
返回:
np.ndarray: 形状为 (4,),元素依次为
- magnitude: 向量的幅值,标量 >= 0
- alpha: 与 x 轴的夹角,单位弧度,范围 [0, π]
- beta: 与 y 轴的夹角,单位弧度,范围 [0, π]
- gamma: 与 z 轴的夹角,单位弧度,范围 [0, π]
当幅值为 0(零向量)时,alpha、beta 和 gamma 返回 np.nan 表示未定义。
"""
x, y, z = vec
magnitude = np.linalg.norm(vec)
if magnitude == 0:
alpha = beta = gamma = np.nan
else:
alpha = np.arccos(x / magnitude)
beta = np.arccos(y / magnitude)
gamma = np.arccos(z / magnitude)
return np.array([magnitude, alpha, beta, gamma])⚠️ 上述代码实现中,使用了 numpy 库中的 ndarray。但在涉及符号计算或含有未知数的情况下,可以使用 sympy 库中的 Matrix 作为替代。