虚功
Virtual Work
基本概念
想象一个物体在力的作用下处于平衡状态。既然是平衡,它实际上是静止的,没有发生任何移动,所以所有力做的“实际的功”都等于零。
我们假想这个物体(或系统)发生了一个极其微小的、符合其约束条件的位移。这个位移并不是真实发生的,它只存在于我们的想象中,因此我们称之为虚位移 (Virtual Displacement),通常用
虚功 (
计算公式和真实的功完全一样,是力与位移的点积:
或者对于力矩和虚转角:
虚功原理
Principle of Virtual Work
如果一个刚体或刚体系统处于平衡状态,那么所有施加在该系统上的外力所做的总虚功,对于任何可能的虚位移,都等于零。
数学上表示为:
虚功原理不是一个全新的物理定律,而是牛顿平衡定律 (
自由度
Degrees of Freedom, DOF
一个系统的自由度,是指完全确定该系统位置所需要的最少独立坐标的数量。
- 单自由度系统:这是本文所讨论的主要类型,也是静力学中最常见的情况。在这样的系统中,只要确定了一个变量,那么系统中所有其他部件 (members) 的位置就都随之唯一确定了。
势能函数的一阶、二阶导数
对于一个由独立坐标
如果其总势能函数
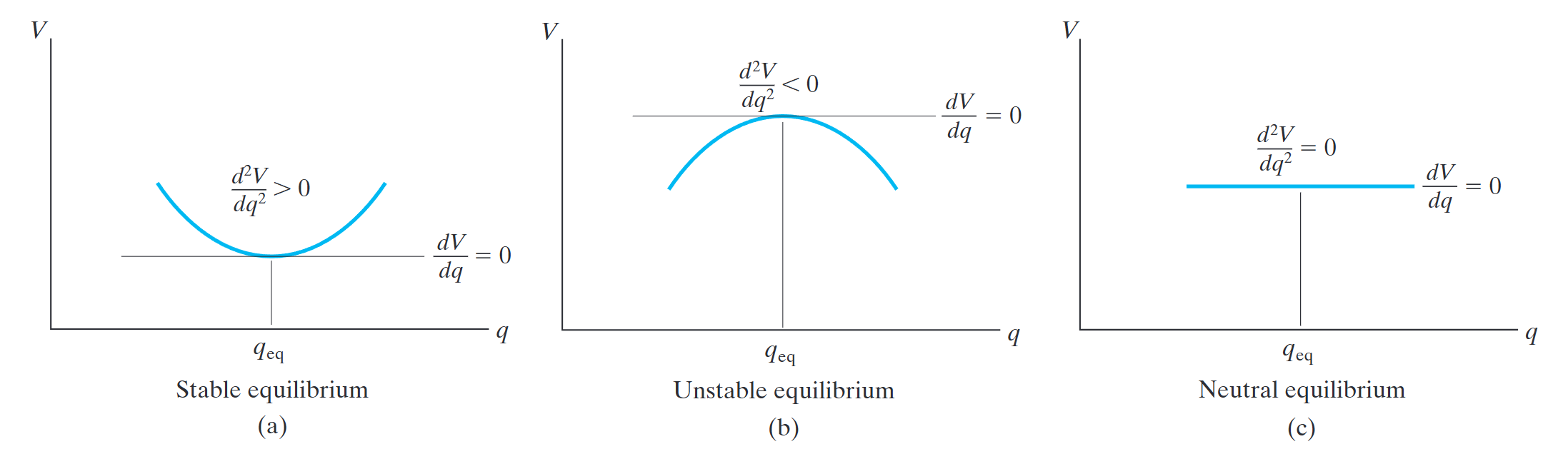
的一阶导数等于 0,那么该系统处于平衡位置。 在总势能函数
的一阶导数等于 0 的基础上: 如果二阶导数大于 0,那么该平衡位置是稳定的。
如果二阶导数小于 0,那么该平衡位置是不稳定的。
如果二阶导数等于 0,那么该平衡位置是临界的,无法判断其稳定性。