结构分析
Structural Analysis
在线仿真模拟网站:2D-Truss Analysis
桁架
Trusses 桁架
https://www.youtube.com/watch?v=Hn_iozUo9m4&ab_channel=TheEfficientEngineer
基本假设
Assumptions for Design
- 结构中所有的节点 (joints) 都可以用销轴连接 (pinned connection) 来表示,这意味着杠件 (members) 可以在节点处自由旋转。桁架的杠件之间通常使用所谓的角撑板 (gusset plate) 刚性连接。若一个节点上所有杠件的中心线相交于一点,则可以假设这个节点是销轴连接。
The members are joined together by smooth pins.
- 荷载 (loading) 只作用在桁架的节点处。即没有荷载作用在一个杠件的中间。因为每个杠件必须处于平衡状态,所以作用在杠件两端的力必须相等且相反。每个杠件不是受到拉伸 (Tension) 就是受到压缩 (Compression)。
All loading are applied at the joints.
简单桁架
Simple Truss
节点法
The Method of Joints
零力构件 / 零杠
Zero-Force Members
If only two non-collinear members form a truss joint and no external load or support reaction is applied to the joint, the two members must be zero-force memebers.
If three members form a truss joint for which two of the members are collinear, the third member is a zero-force member provided no external force or support reaction has a component that acts along this member.
截面法
The Method of Sections
* 空间桁架
Space Trusses
在本书中属于非重点内容。
A space truss consists of members joined together at their ends to form a stable three-dimensional structure. The simplest form of a space truss is a tetrahedron, constructed by connecting six members together.
框架与机械
Frames and Machines
综合题目
补充
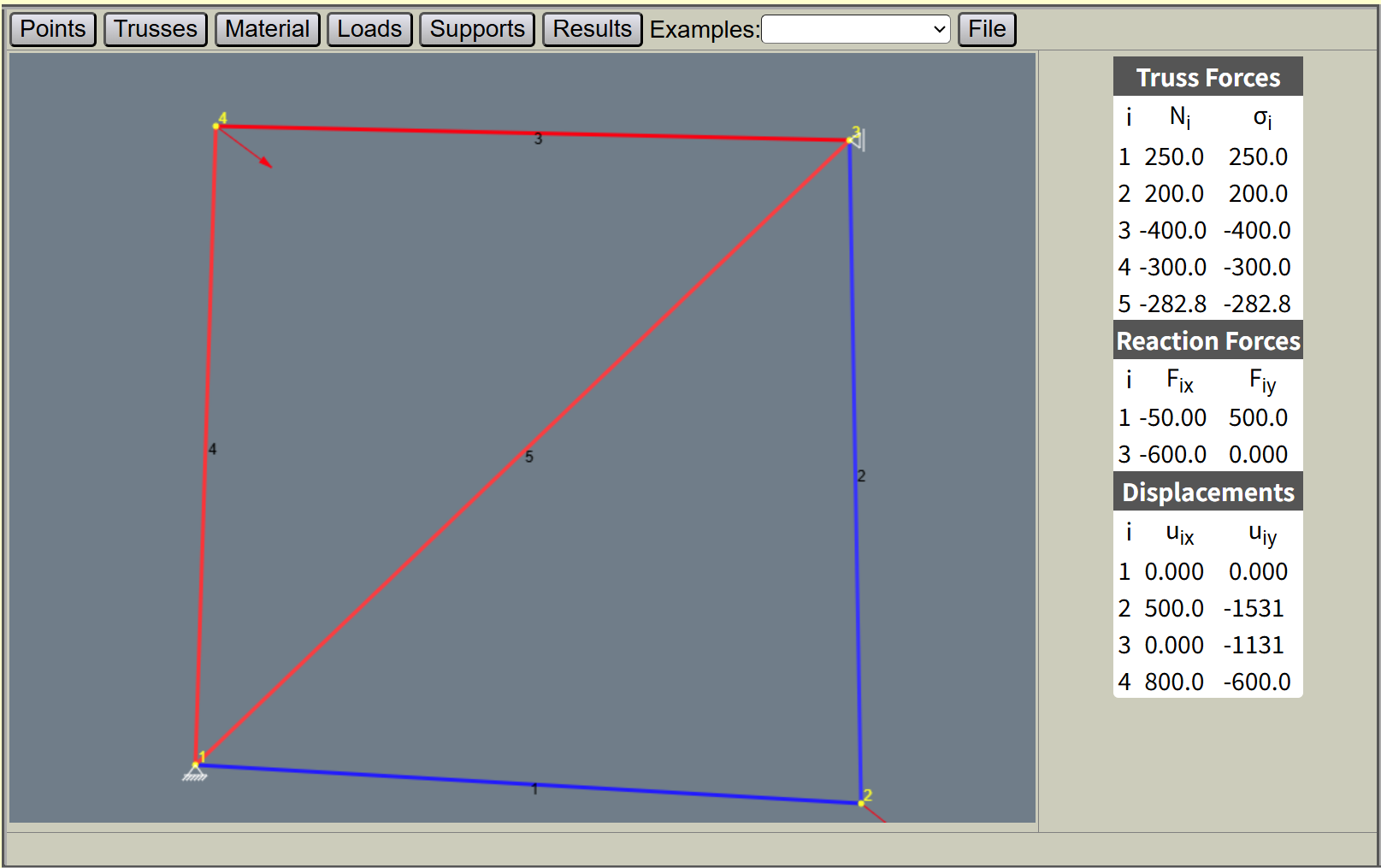
2D-Truss Analysis
在线二维结构分析工具:2D-Truss calculator - online
示例
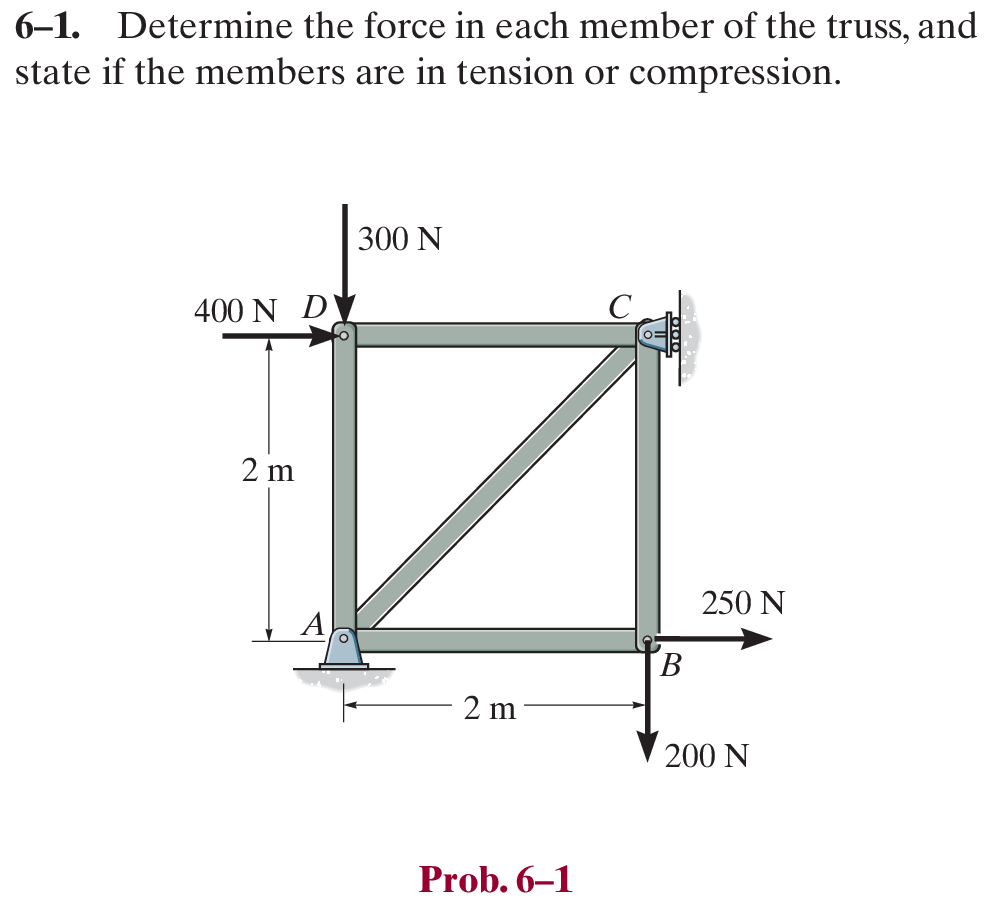
Prob_6_1
Python 解题
# ===============================================================================
# 6-1. 桁架结构分析 - 节点法求解 (优化注释版本)
# ===============================================================================
#
# 问题描述:
# 假设构件 AB, BC, CD, DA, AC 分别承受轴向力 F1, F2, F3, F4, F5
# 力的符号约定:正值为拉力,负值为压力
#
# 求解方法:使用节点法(Method of Joints)
# 基本原理:对每个节点建立力平衡方程(ΣFx = 0, ΣFy = 0)
# ===============================================================================
import sympy as sp
# ===============================================================================
# 第一步:分析节点 B 的力平衡
# ===============================================================================
# 节点 B 受到外载荷:水平向右 250N,竖直向下 200N
F_load_B = sp.Matrix([250, -200]) # [Fx, Fy],y轴向上为正
# 计算节点 B 与构件 BA 和 BC 的连接力
# 注意:这里使用点积投影来分解外载荷
F_BA = - F_load_B.dot(sp.Matrix([1, 0])) * sp.Matrix([1, 0]) # BA方向力(水平)
F_BC = - F_load_B.dot(sp.Matrix([0, 1])) * sp.Matrix([0, 1]) # BC方向力(竖直)
# 计算构件轴向力的大小(注意方向)
F1 = F_BA.dot(sp.Matrix([-1, 0])) # AB构件轴向力(从A指向B为正)
F2 = F_BC.dot(sp.Matrix([0, 1])) # BC构件轴向力(从B指向C为正)
# ===============================================================================
# 第二步:分析节点 D 的力平衡
# ===============================================================================
# 节点 D 受到外载荷:水平向右 400N,竖直向下 300N
F_load_D = sp.Matrix([400, -300]) # [Fx, Fy]
# 计算节点 D 与构件 DC 和 DA 的连接力
F_DC = - F_load_D.dot(sp.Matrix([1, 0])) * sp.Matrix([1, 0]) # DC方向力(水平)
F_DA = - F_load_D.dot(sp.Matrix([0, 1])) * sp.Matrix([0, 1]) # DA方向力(竖直)
# 计算构件轴向力的大小
F3 = F_DC.dot(sp.Matrix([1, 0])) # CD构件轴向力(从C指向D为正)
F4 = F_DA.dot(sp.Matrix([0, -1])) # DA构件轴向力(从D指向A为正)
# ===============================================================================
# 第三步:分析节点 C 的力平衡
# ===============================================================================
# 节点 C 连接构件:CB, CD, CA 以及可能的支反力
F_CB = - F_BC # CB力等于BC力的反向
F_CD = - F_DC # CD力等于DC力的反向
# 定义未知量:AC构件的轴向力大小和C点的支反力
F_CA_magnitude, C_x = sp.symbols('F_CA_magnitude, C_x', real=True)
C = sp.Matrix([C_x, 0]) # C点支反力(仅水平方向)
# AC构件与水平方向成-135°角(从A指向C)
angle_AC = sp.rad(-135) # 转换为弧度
F_CA = sp.Matrix([
F_CA_magnitude * sp.cos(angle_AC), # AC力的x分量
F_CA_magnitude * sp.sin(angle_AC) # AC力的y分量
])
# 建立节点C的力平衡方程
eqs = [
sp.Eq(F_CB[0] + F_CD[0] + C[0] + F_CA[0], 0), # x方向平衡:ΣFx = 0
sp.Eq(F_CB[1] + F_CD[1] + F_CA[1], 0) # y方向平衡:ΣFy = 0
]
# ===============================================================================
# 第四步:分析节点 A 的力平衡
# ===============================================================================
# 节点 A 连接构件:AB, AD, AC 以及支反力
A_x, A_y = sp.symbols('A_x A_y', real=True) # A点的支反力分量
F_AB = - F_BA # AB力等于BA力的反向
F_AD = - F_DA # AD力等于DA力的反向
F_AC = - F_CA # AC力等于CA力的反向
A = sp.Matrix([A_x, A_y]) # A点支反力向量
# 建立节点A的力平衡方程,并添加到方程组中
eqs.append(sp.Eq(F_AB[0] + F_AD[0] + A[0] + F_AC[0], 0)) # x方向平衡
eqs.append(sp.Eq(F_AB[1] + F_AD[1] + A[1] + F_AC[1], 0)) # y方向平衡
# ===============================================================================
# 第五步:求解联立方程组
# ===============================================================================
# 同时求解所有未知量:AC构件轴向力、支反力等
sol = sp.solve(eqs, [F_CA_magnitude, C_x, A_x, A_y], dict=True)
# 计算AC构件的轴向力(沿构件方向的分量)
unit_vector_AC = sp.Matrix([sp.cos(angle_AC), sp.sin(angle_AC)])
F5 = F_CA.subs(sol[0]).dot(unit_vector_AC)
# ===============================================================================
# 结果输出和解释
# ===============================================================================
print("=" * 70)
print("桁架结构分析结果(节点法)")
print("=" * 70)
print("假设构件 AB, BC, CD, DA, AC 分别承受轴向力 F1, F2, F3, F4, F5")
print("符号约定:正值表示拉力,负值表示压力")
print("-" * 70)
member_names = ["AB", "BC", "CD", "DA", "AC"]
for i, (member, force) in enumerate(zip(member_names, [F1, F2, F3, F4, F5]), start=1):
force_type = "拉力" if float(force) > 0 else "压力"
print(f"F{i} ({member}): {force:.2f} N ({force_type})")
print("=" * 70)输出结果:
======================================================================
桁架结构分析结果(节点法)
======================================================================
假设构件 AB, BC, CD, DA, AC 分别承受轴向力 F1, F2, F3, F4, F5
符号约定:正值表示拉力,负值表示压力
----------------------------------------------------------------------
F1 (AB): 250.00 N (拉力)
F2 (BC): 200.00 N (拉力)
F3 (CD): -400.00 N (压力)
F4 (DA): -300.00 N (压力)
F5 (AC): -282.84 N (压力)
======================================================================2D-Truss Analysis 解题
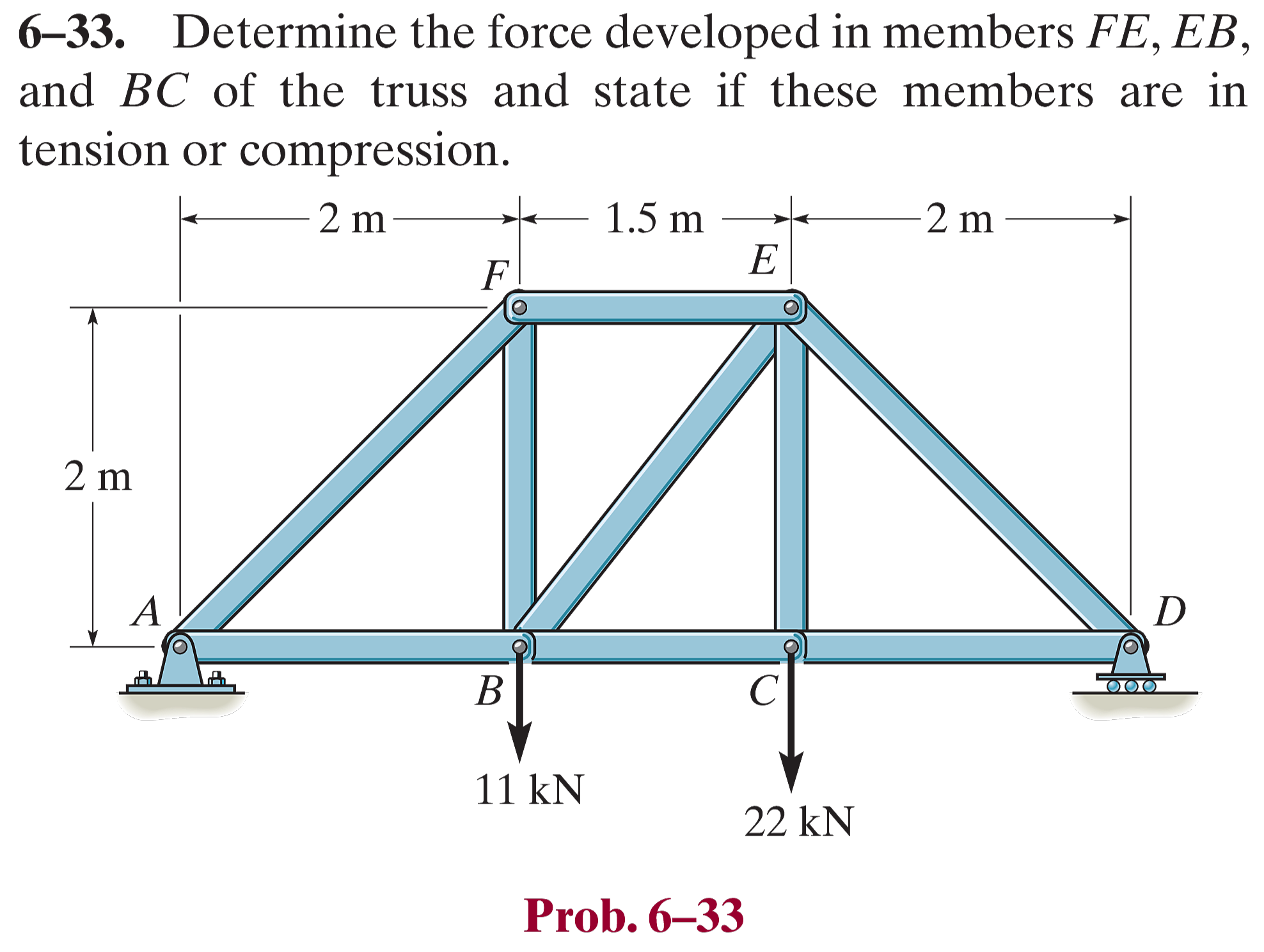
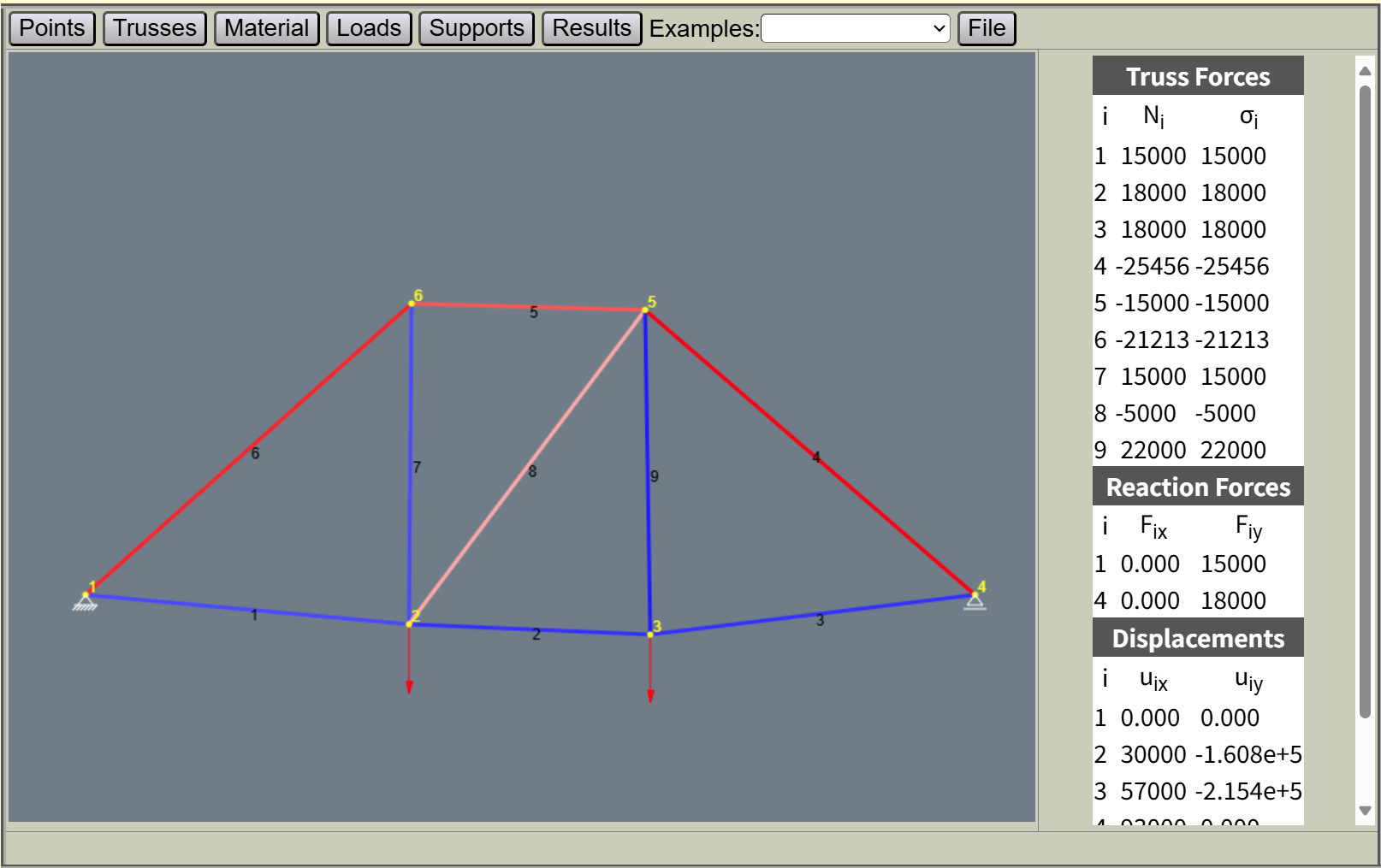
Prob_6_33
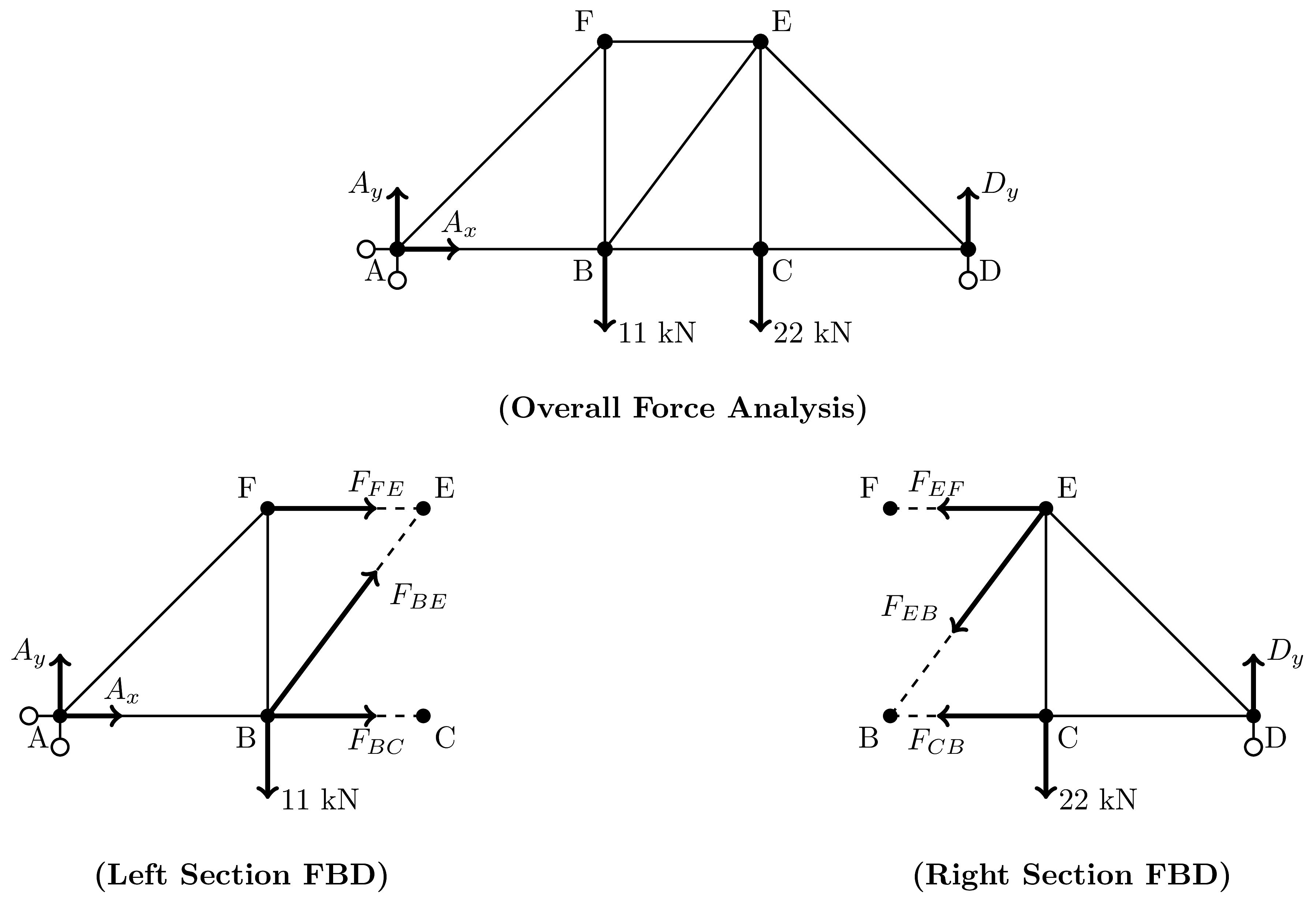
受力分析图
Python 解题
# ===============================================================================
# 6-33. 桁架结构分析 - 截面法求解 (优化注释版本)
# ===============================================================================
#
# 问题描述:
# 使用截面法(Method of Sections)分析桁架结构中特定构件的内力
#
# 求解方法:截面法
# 基本原理:通过假想切开桁架的某个截面,对截面一侧的部分建立平衡方程
# 优势:可以直接求出感兴趣构件的内力,无需逐个节点分析
# ===============================================================================
import sympy as sp
# ===============================================================================
# 步骤一:定义桁架几何结构
# ===============================================================================
# 定义桁架各节点的坐标位置 (单位:m)
point_A = sp.Matrix([0, 0]) # 左支座点A
point_B = sp.Matrix([2, 0]) # 节点B
point_C = sp.Matrix([3.5, 0]) # 节点C
point_D = sp.Matrix([5.5, 0]) # 右支座点D
point_E = sp.Matrix([3.5, 2]) # 上弦节点E
point_F = sp.Matrix([2, 2]) # 上弦节点F
# 定义外载荷 (单位:N,向下为负)
G_B = sp.Matrix([0, -11e3]) # 节点B处的垂直载荷:11 kN向下
G_C = sp.Matrix([0, -22e3]) # 节点C处的垂直载荷:22 kN向下
# ===============================================================================
# 步骤二:计算支座反力
# ===============================================================================
# 定义支座反力的未知量
A_y = sp.symbols('A_y', real=True) # A点竖直反力
D_y = sp.symbols('D_y', real=True) # D点竖直反力
A = sp.Matrix([0, A_y]) # A点反力向量(水平反力为0,因为无水平外力)
D = sp.Matrix([0, D_y]) # D点反力向量
# 计算位置向量(从A点到各力作用点)
r_AB = point_B - point_A # A到B的位置向量
r_AC = point_C - point_A # A到C的位置向量
r_AD = point_D - point_A # A到D的位置向量
# 定义二维向量叉积函数(计算力矩标量值)
def cross2d(a, b):
"""计算二维向量的叉积标量值 a × b = a_x*b_y - a_y*b_x"""
return a[0]*b[1] - a[1]*b[0]
# 建立平衡方程
# 1. 对A点的力矩平衡:ΣM_A = 0
M_A = cross2d(r_AB, G_B) + cross2d(r_AC, G_C) + cross2d(r_AD, D)
# 2. 竖直方向力平衡:ΣF_y = 0
force_balance_y = A_y + G_B[1] + G_C[1] + D_y
# 求解支座反力
support_eqs = [
sp.Eq(M_A, 0), # 力矩平衡方程
sp.Eq(force_balance_y, 0) # 竖直力平衡方程
]
support_sol = sp.solve(support_eqs, [A_y, D_y], dict=True)
A_y_value = support_sol[0][A_y]
D_y_value = support_sol[0][D_y]
# 更新支座反力向量
A = sp.Matrix([0, A_y_value])
D = sp.Matrix([0, D_y_value])
print(f"支座反力计算结果:")
print(f"A点竖直反力: {A_y_value/1000:.1f} kN ({'向上' if A_y_value > 0 else '向下'})")
print(f"D点竖直反力: {D_y_value/1000:.1f} kN ({'向上' if D_y_value > 0 else '向下'})")
print(f"验证:总竖直力 = {(A_y_value + D_y_value + G_B[1] + G_C[1])/1000:.1f} kN (应为0)")
print("-" * 70)
# 清理临时变量
del support_eqs, support_sol
# ===============================================================================
# 步骤三:使用截面法分析构件内力
# ===============================================================================
# 定义待求构件的轴向力大小(未知量)
F_BC_magnitude = sp.symbols('F_BC_magnitude', real=True) # BC构件轴向力
F_BE_magnitude = sp.symbols('F_BE_magnitude', real=True) # BE构件轴向力
F_EF_magnitude = sp.symbols('F_EF_magnitude', real=True) # EF构件轴向力
# ===============================================================================
# 方法一:分析左侧截面
# ===============================================================================
# 计算构件方向向量和单位向量
r_BC = point_C - point_B # BC构件方向向量
r_BE = point_E - point_B # BE构件方向向量
r_FE = point_E - point_F # FE构件方向向量(注意:从F指向E)
u_BC = r_BC / r_BC.norm() # BC构件单位向量
u_BE = r_BE / r_BE.norm() # BE构件单位向量
u_FE = r_FE / r_FE.norm() # FE构件单位向量
# 构件内力向量(轴向力 × 单位向量)
F_BC = F_BC_magnitude * u_BC # BC构件内力向量
F_BE = F_BE_magnitude * u_BE # BE构件内力向量
F_FE = F_EF_magnitude * u_FE # FE构件内力向量
# 建立左侧截面的平衡方程
# 选择B点作为力矩平衡点(可消除通过B点的力的力矩)
r_BF = point_F - point_B # B到F的位置向量
r_BA = point_A - point_B # B到A的位置向量
# 对B点的力矩平衡:ΣM_B = 0
M_B = cross2d(r_BF, F_FE) + cross2d(r_BA, A)
# 力平衡方程:ΣF_x = 0, ΣF_y = 0
force_x = F_BC[0] + F_BE[0] + F_FE[0] + A[0] + G_B[0]
force_y = F_BC[1] + F_BE[1] + F_FE[1] + A[1] + G_B[1]
# 建立方程组并求解
left_section_eqs = [
sp.Eq(M_B, 0), # 力矩平衡
sp.Eq(force_x, 0), # x方向力平衡
sp.Eq(force_y, 0) # y方向力平衡
]
left_section_sol = sp.solve(left_section_eqs, [F_BC_magnitude, F_BE_magnitude, F_EF_magnitude], dict=True)
print("左侧截面分析结果:")
for member, magnitude in [("BC", F_BC_magnitude), ("BE", F_BE_magnitude), ("EF", F_EF_magnitude)]:
force_value = left_section_sol[0][magnitude]
force_type = "拉力" if force_value > 0 else "压力"
print(f"构件{member}: {force_value/1000:.2f} kN ({force_type})")
# 清理临时变量
del left_section_eqs, left_section_sol
# ===============================================================================
# 方法二:分析右侧截面(验证)
# ===============================================================================
# 注意:右侧截面中构件方向需要重新定义(指向截面内部)
r_CB = point_B - point_C # CB构件方向向量(从C指向B)
r_EB = point_B - point_E # EB构件方向向量(从E指向B)
r_EF = point_F - point_E # EF构件方向向量(从E指向F)
u_CB = r_CB / r_CB.norm() # CB构件单位向量
u_EB = r_EB / r_EB.norm() # EB构件单位向量
u_EF = r_EF / r_EF.norm() # EF构件单位向量
# 构件内力向量(注意:轴向力大小相同,但方向需要调整)
F_CB = F_BC_magnitude * u_CB # CB构件内力向量
F_EB = F_BE_magnitude * u_EB # EB构件内力向量
F_EF = F_EF_magnitude * u_EF # EF构件内力向量
# 建立右侧截面的平衡方程
# 选择C点作为力矩平衡点
r_CD = point_D - point_C # C到D的位置向量
r_CE = point_E - point_C # C到E的位置向量
# 对C点的力矩平衡:ΣM_C = 0
M_C = cross2d(r_CD, D) + cross2d(r_CE, F_EB) + cross2d(r_CE, F_EF)
# 力平衡方程:ΣF_x = 0, ΣF_y = 0
force_x_right = F_CB[0] + F_EB[0] + F_EF[0] + D[0] + G_C[0]
force_y_right = F_CB[1] + F_EB[1] + F_EF[1] + D[1] + G_C[1]
# 建立方程组并求解
right_section_eqs = [
sp.Eq(M_C, 0), # 力矩平衡
sp.Eq(force_x_right, 0), # x方向力平衡
sp.Eq(force_y_right, 0) # y方向力平衡
]
right_section_sol = sp.solve(right_section_eqs, [F_BC_magnitude, F_BE_magnitude, F_EF_magnitude], dict=True)
print("右侧截面分析结果:")
for member, magnitude in [("BC", F_BC_magnitude), ("BE", F_BE_magnitude), ("EF", F_EF_magnitude)]:
force_value = right_section_sol[0][magnitude]
force_type = "拉力" if force_value > 0 else "压力"
print(f"构件{member}: {force_value/1000:.2f} kN ({force_type})")
# ===============================================================================
# 结果验证和总结
# ===============================================================================
print("\n" + "=" * 70)
print("截面法分析总结")
print("=" * 70)
print("验证:左侧截面和右侧截面的分析结果应该完全一致")
print("这证明了截面法的正确性和力学平衡的一致性")
print()
print("最终结果:")
for member, magnitude in [("BC", F_BC_magnitude), ("BE", F_BE_magnitude), ("EF", F_EF_magnitude)]:
force_value = right_section_sol[0][magnitude]
force_type = "拉力" if force_value > 0 else "压力"
print(f"构件{member}: {abs(force_value)/1000:.2f} kN ({force_type})")
print("=" * 70)输出结果:
支座反力计算结果:
A点竖直反力: 15.0 kN (向上)
D点竖直反力: 18.0 kN (向上)
验证:总竖直力 = 0.0 kN (应为0)
----------------------------------------------------------------------
左侧截面分析结果:
构件BC: 18.00 kN (拉力)
构件BE: -5.00 kN (压力)
构件EF: -15.00 kN (压力)
右侧截面分析结果:
构件BC: 18.00 kN (拉力)
构件BE: -5.00 kN (压力)
构件EF: -15.00 kN (压力)
======================================================================
截面法分析总结
======================================================================
验证:左侧截面和右侧截面的分析结果应该完全一致
这证明了截面法的正确性和力学平衡的一致性
最终结果:
构件BC: 18.00 kN (拉力)
构件BE: 5.00 kN (压力)
构件EF: 15.00 kN (压力)
======================================================================2D-Truss Analysis 解题
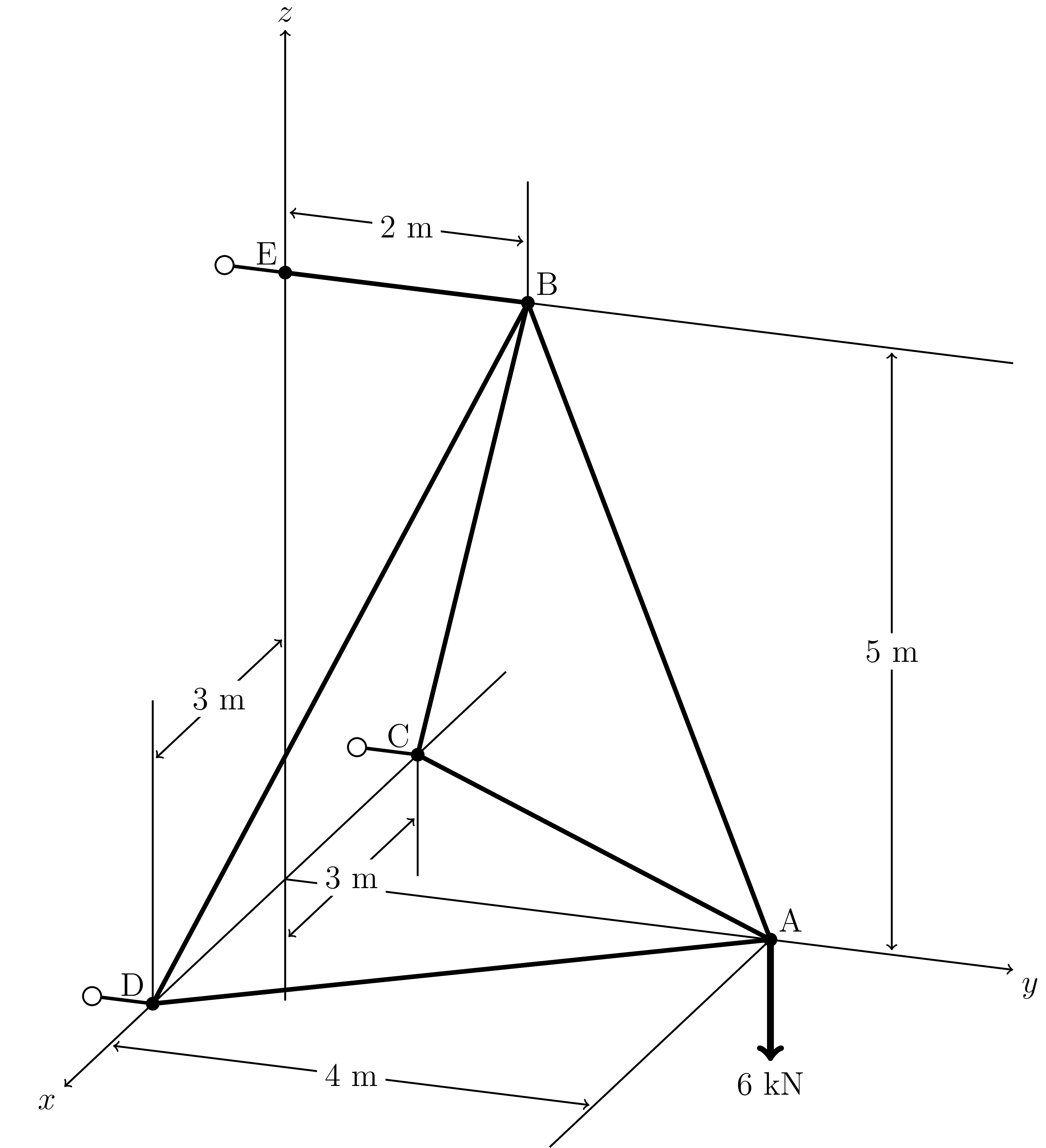
Prob_6_50
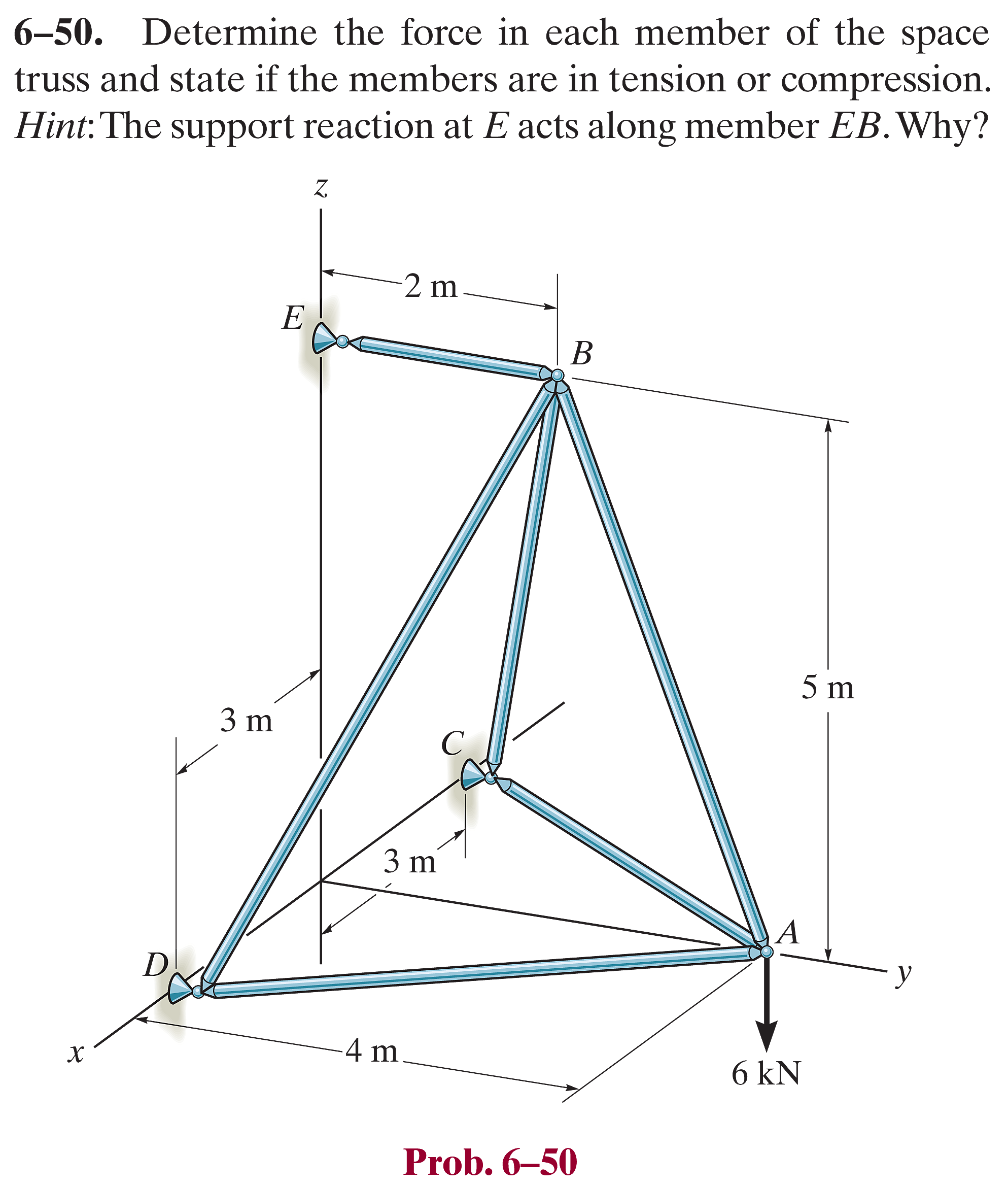
TikZ 作图
Python 解题
import sympy as sp
point_A = sp.Matrix([0, 4, 0])
point_B = sp.Matrix([0, 2, 5])
point_C = sp.Matrix([-3, 0, 0])
point_D = sp.Matrix([3, 0, 0])
point_E = sp.Matrix([0, 0, 5])
G_A = sp.Matrix([0, 0, -6e3])
# 节点法
## 节点A
F_AB_magnitude = sp.symbols('F_AB', real=True)
F_AC_magnitude = sp.symbols('F_AC', real=True)
F_AD_magnitude = sp.symbols('F_AD', real=True)
u_AB = (point_B - point_A).normalized()
u_AC = (point_C - point_A).normalized()
u_AD = (point_D - point_A).normalized()
F_AB = F_AB_magnitude * u_AB
F_AC = F_AC_magnitude * u_AC
F_AD = F_AD_magnitude * u_AD
eqs = [
sp.Eq(F_AB[0] + F_AC[0] + F_AD[0] + G_A[0], 0),
sp.Eq(F_AB[1] + F_AC[1] + F_AD[1] + G_A[1], 0),
sp.Eq(F_AB[2] + F_AC[2] + F_AD[2] + G_A[2], 0)
]
## 节点B
F_BA = - F_AB
F_BC_magnitude = sp.symbols('F_BC', real=True)
F_BD_magnitude = sp.symbols('F_BD', real=True)
F_BE_magnitude = sp.symbols('F_BE', real=True)
u_BC = (point_C - point_B).normalized()
u_BD = (point_D - point_B).normalized()
u_BE = (point_E - point_B).normalized()
F_BC = F_BC_magnitude * u_BC
F_BD = F_BD_magnitude * u_BD
F_BE = F_BE_magnitude * u_BE
eqs.append(sp.Eq(F_BA[0] + F_BC[0] + F_BD[0] + F_BE[0], 0))
eqs.append(sp.Eq(F_BA[1] + F_BC[1] + F_BD[1] + F_BE[1], 0))
eqs.append(sp.Eq(F_BA[2] + F_BC[2] + F_BD[2] + F_BE[2], 0))
sol = sp.solve(eqs, [F_AB_magnitude,
F_AC_magnitude,
F_AD_magnitude,
F_BC_magnitude,
F_BD_magnitude,
F_BE_magnitude,
], dict=True)
# 各个杠杆的受力情况
print("=== 各个杠杆的受力情况 ===")
F_AB_val = sol[0][F_AB_magnitude]
F_AC_val = sol[0][F_AC_magnitude]
F_AD_val = sol[0][F_AD_magnitude]
F_BC_val = sol[0][F_BC_magnitude]
F_BD_val = sol[0][F_BD_magnitude]
F_BE_val = sol[0][F_BE_magnitude]
def force_type(force_value):
if abs(force_value) < 1e-6: # 接近零的值
return "零杆"
elif force_value > 0:
return "拉力"
else:
return "压力"
print(f"F_AB = {F_AB_val:.3g} N ({force_type(F_AB_val)})")
print(f"F_AC = {F_AC_val:.3g} N ({force_type(F_AC_val)})")
print(f"F_AD = {F_AD_val:.3g} N ({force_type(F_AD_val)})")
print(f"F_BC = {F_BC_val:.3g} N ({force_type(F_BC_val)})")
print(f"F_BD = {F_BD_val:.3g} N ({force_type(F_BD_val)})")
print(f"F_BE = {F_BE_val:.3g} N ({force_type(F_BE_val)})")输出结果:
=== 各个杠杆的受力情况 ===
F_AB = 6.46e+3 N (拉力)
F_AC = -1.50e+3 N (压力)
F_AD = -1.50e+3 N (压力)
F_BC = -3.70e+3 N (压力)
F_BD = -3.70e+3 N (压力)
F_BE = 4.80e+3 N (拉力)Prob_F6_24
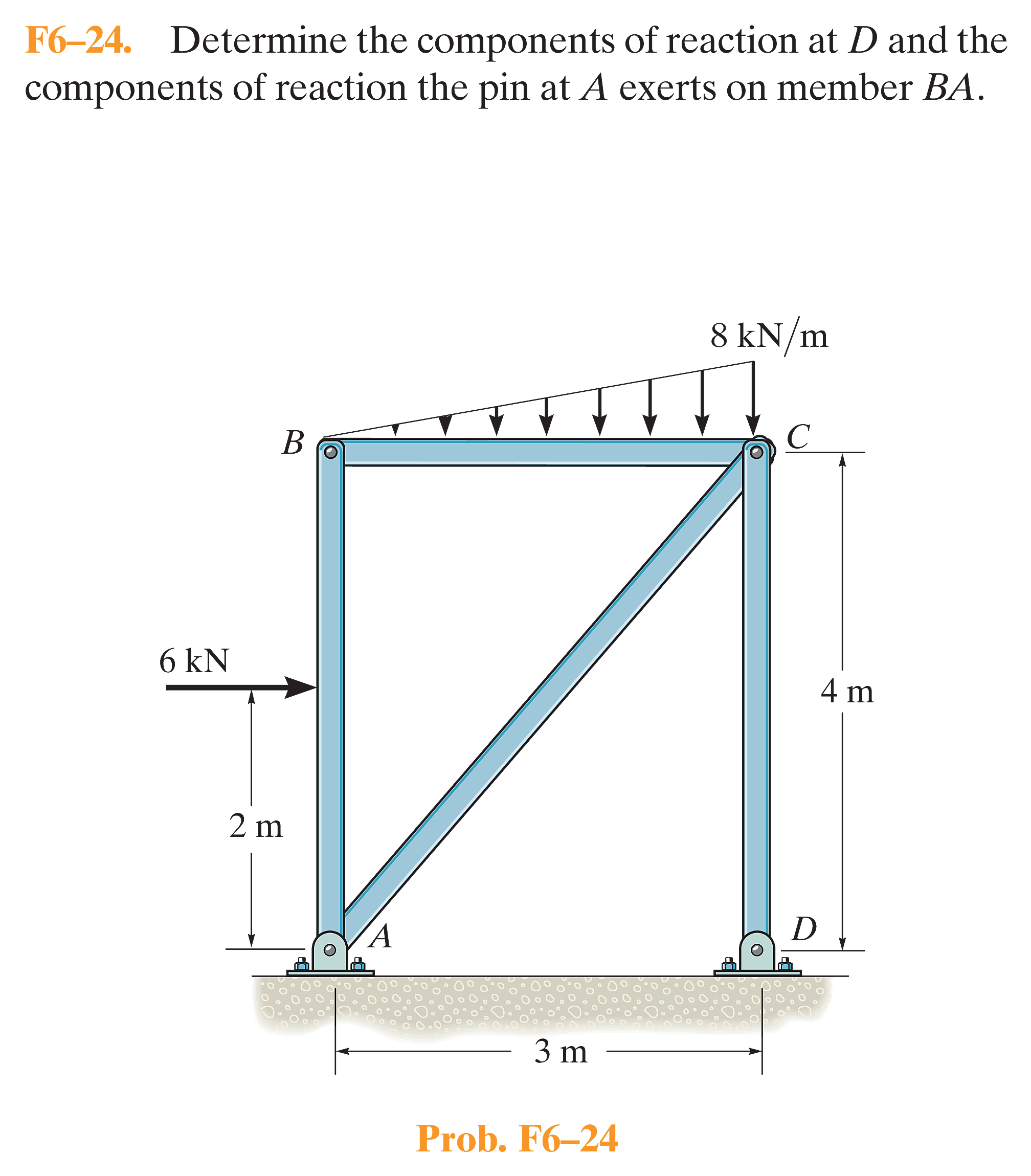
受力分析图
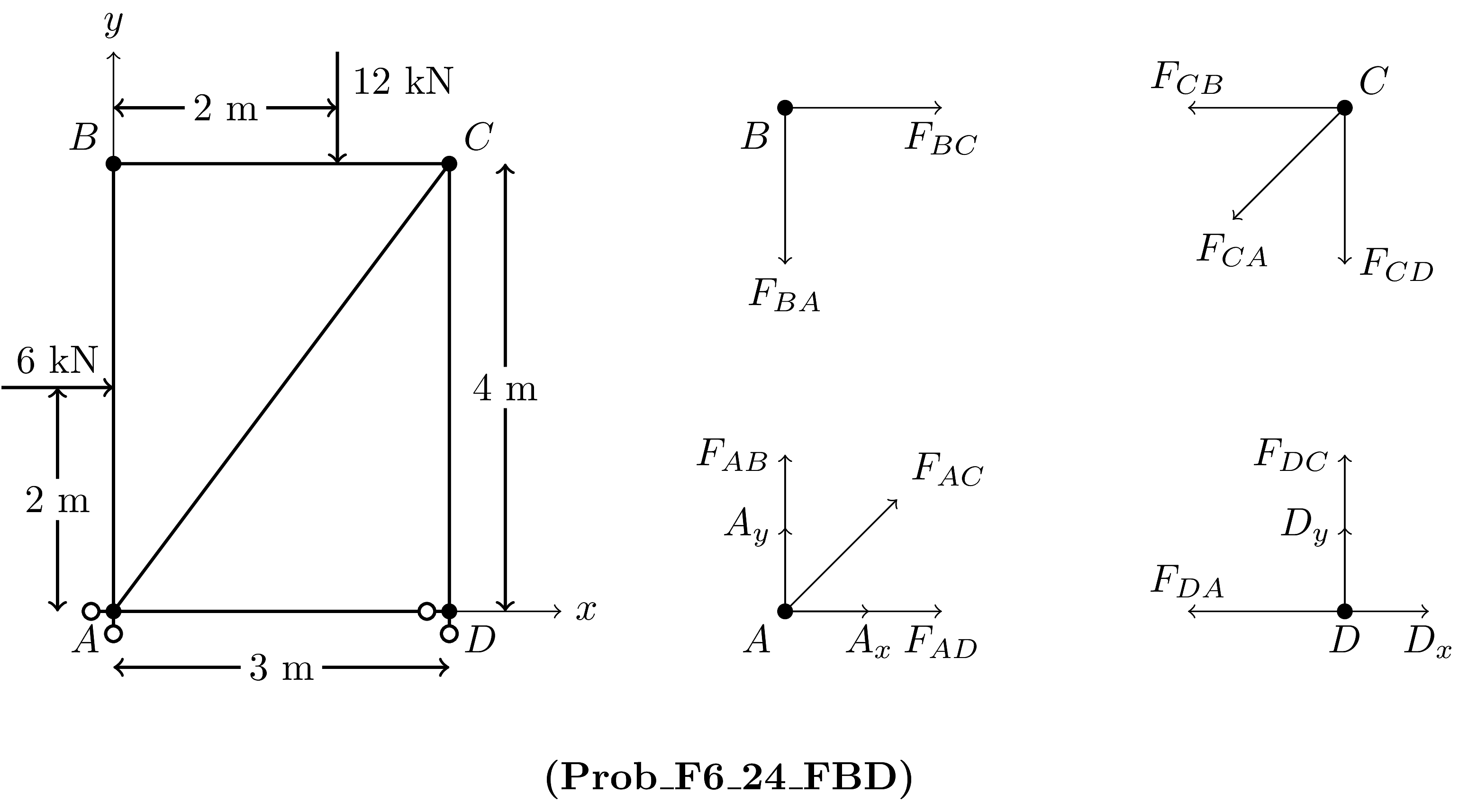
Python 解题
import sympy as sp
point_A = sp.Matrix([0, 0])
point_B = sp.Matrix([0, 4])
point_C = sp.Matrix([3, 4])
point_D = sp.Matrix([3, 0])
F_1 = sp.Matrix([6e3, 0])
F_2 = sp.Matrix([0, -12e3])
position_1 = sp.Matrix([0, 2])
position_2 = sp.Matrix([2, 4])
A_x, A_y = sp.symbols('A_x A_y', real=True)
D_x, D_y = sp.symbols('D_x D_y', real=True)
def cross_2D(r, F):
return r[0]*F[1] - r[1]*F[0]
# M_C
F_AB_magnitude = sp.symbols('F_AB', real=True)
F_BA = F_AB_magnitude * sp.Matrix([0, -1])
r_CB = point_B - point_C
r_C2 = position_2 - point_C
M_C = cross_2D(r_CB, F_BA) + cross_2D(r_C2, F_2)
sol = sp.solve(sp.Eq(M_C, 0), F_AB_magnitude, dict=True)[0]
F_AB_magnitude = sol[F_AB_magnitude]
F_BA = F_AB_magnitude * sp.Matrix([0, -1])
F_AB = -F_BA
sol = sp.solve(sp.Eq(sp.Matrix([0, A_y]) + F_AB, sp.Matrix([0, 0])), A_y, dict=True)[0]
A_y = sol[A_y]
# M_B
r_BA = point_A - point_B
r_B1 = position_1 - point_B
M_B = cross_2D(r_B1, F_1) + cross_2D(r_BA, sp.Matrix([A_x, 0]))
sol = sp.solve(sp.Eq(M_B, 0), A_x, dict=True)[0]
A_x = sol[A_x]
# M_A
r_A1 = position_1 - point_A
r_A2 = position_2 - point_A
r_AD = point_D - point_A
M_A = cross_2D(r_A1, F_1) + cross_2D(r_A2, F_2) + cross_2D(r_AD, sp.Matrix([0, D_y]))
sol = sp.solve(sp.Eq(M_A, 0), D_y, dict=True)[0]
D_y = sol[D_y]
# M_C
D_x = 0
print(f"A_x = {A_x/1e3:.2f} kN")
print(f"A_y = {A_y/1e3:.2f} kN")
print(f"D_x = {D_x/1e3:.2f} kN")
print(f"D_y = {D_y/1e3:.2f} kN")输出:
A_x = -3.00 kN
A_y = 4.00 kN
D_x = 0.00 kN
D_y = 12.00 kN